KineFX:肩の補正の続きとなります。
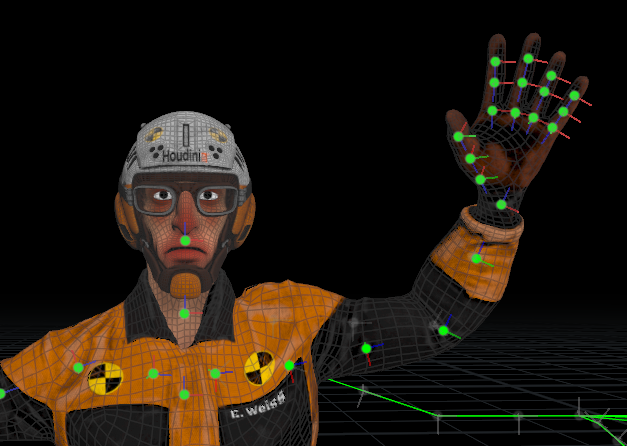
Realisitic Sholderにはlookat_clavicleの入力があります。

lookat_clavicleは、肩関節の方を向いている鎖骨関節の軸を指定。
lookat_clavicleを追加します。
ここで、Shoulder方向を向いているジョイントは+Zとなります。
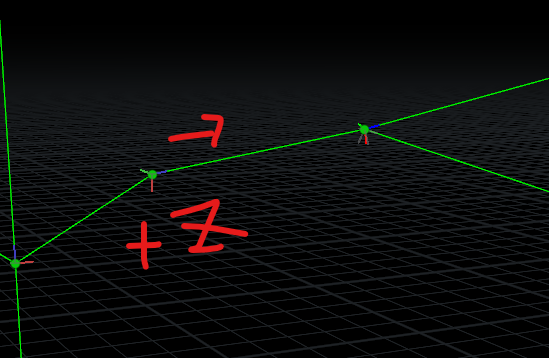
そこで、Constantノードを作成し、Constant Typeを3floats(vector)、3 Float Defaultを+z(0,0,1)に設定します。

このConstantをRealisitic Sholderのlookat_clavicleに接続します。
これで常に鎖骨の+zは肩ジョイントの方向を指します。

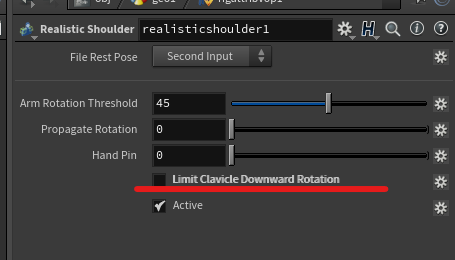
Realisitic Sholderのlimitclavicledownwardは、入力が接続されている場合、鎖骨点からの下向きの回転を補正します。レストポーズが回転基準として使用されます。鎖骨のレストポーズの回転より下の回転はすべて補正されます。これが必要ない場合、Realisitic SholderのLimit Clabicle Downward Rotationをオフにします。
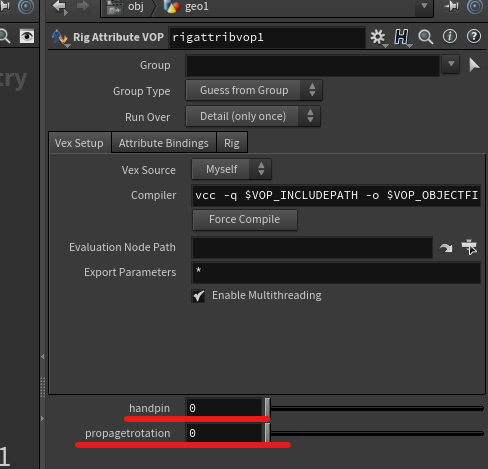
handpinは、オペレータからの手の位置と入力からの手の位置とのブレンド量(0~1)を設定します。これをRig Attribute VOPの外で設定できるようにするためにParameterノードを作成し接続します。
Nameをhandpinに設定し、Realisitic Sholderのhandpinに接続します。

propagaterotationは、伝搬する回転の割合を設定することができます。
これもparameterノードを作成し、Nameをpropagationrotationに設定、Realisitic Sholderののpropagaterotationと接続します。

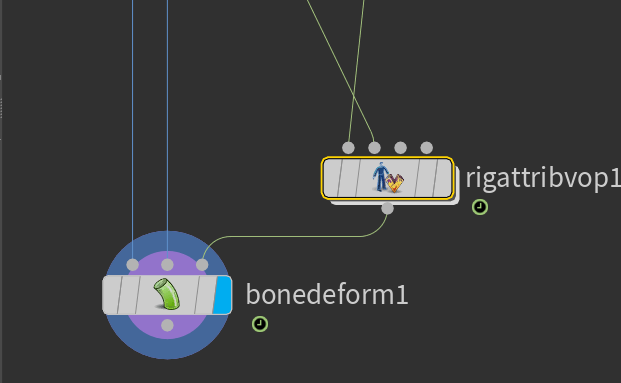
Rig Attribute VOPネットワークの外にでると、Rig Attribute VOP自体に追加したパラメーターが表示されています。
Rig Attribute VOPをBone Deformに接続します。
PropagateRotationが0の場合
PropagetRotationの値を1に近づけると、肩の回転を鎖骨で補正するようになります。

PropagetRotationを上げると、鎖骨による回転が加わるため、手首の位置がずれてしまいます。
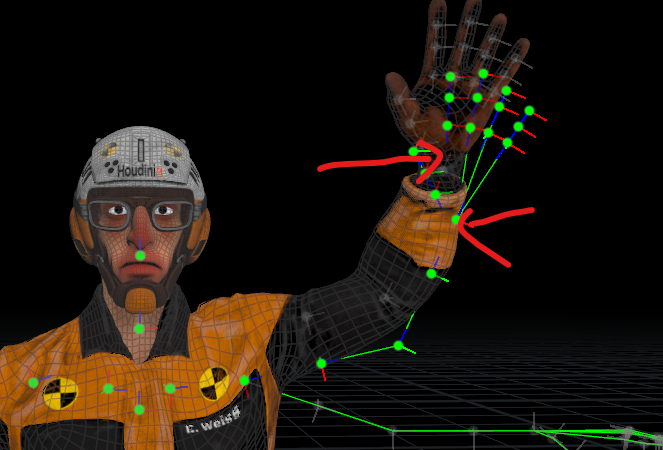
そこで、Rig Attribute VOPに追加したhandpinパラメーターを1に設定すると元の手首の位置に合わせることができます。これは、0-1の間でどの程度元の手首の位置に合わせるのかを決めることができます。